لقد قامت أقدام Gecko بالفعل بشيء مشابه للروبوتات خارج الماء ، حيث توفر الشعرات التي تنقسم وتقسيم مرة أخرى مساحة سطح ضخمة حيث يمكن لقوات Van der Waals أن تضيف ما يصل إلى شيء مفيد لسطح القبضات أو القدمين الاصطناعي.
ومع ذلك ، لا يمكن أن يعمل مخطط Gecko تحت الماء.
سعى الباحثون في سيول إلى شيء ما مع: تباطؤ الالتصاق العالي للحفاظ عليه عالقًا دون تأثير خارجي ، لكن هذا من شأنه أن يلفت الانصهار بسرعة عند الاقتضاء.
التي أخذتهم إلى الجانب السفلي من نجم البحر ، حيث تنتهي مئات الساقين المصغرة الناعمة بأقدام تشبه المصاصة والتي يمكن امتصاصها مؤقتًا على الأسطح.
في الشيء الحقيقي ، يعمل ضغط الماء المتحكم فيه بالحيوان داخل الساق على حجاب الحاجز في الأسفل لإغلاق القدم الشبيهة بالصاصة وفتحها.
وقال هايونسيك يون البروفيسور الجزيئي في سيولتيك: “يمكن لـ Starfish ، وهو نوع من echinoderm ، أن يتحرك على الصخور ، والالتزام بالسطح الخشن ، وإرم الحبوب الرملية”.
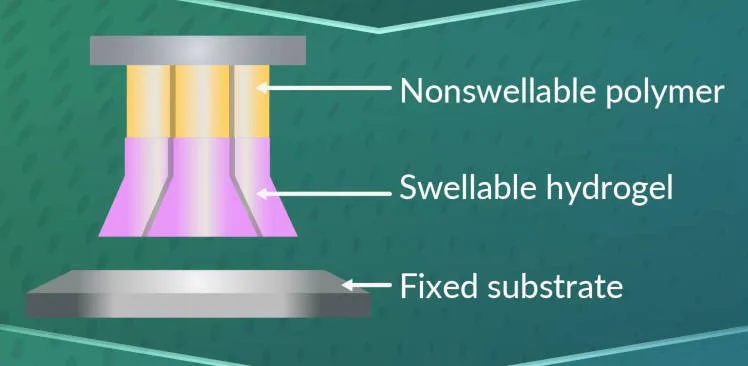
القدم الاصطناعية المستوحاة من النجوم مصنوعة من قسمين أسطوانيين أنبوبيين متشكلان نهاية (الرسم البياني العلوي). لا يوجد حجاب الحاجز في الأسفل.
أحدهما هو جذع جامد ، في حين أن الآخر هو هيدروجيل ناعم يشكل قاتمًا ثم كوبًا في نهايته الحرة – نهاية ناعمة تمتد وتنتشر عندما يتواصل مع السطح.
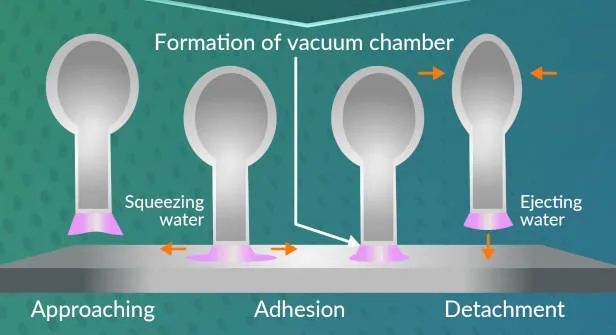
“في نهاية المطاف ، يسهل هذا التحول التصاق المرغوب فيه للقدم لاستهداف الأسطح” ، وفقًا لما ذكره Seoultech. “والجدير بالذكر أن تشكيل فراغ داخل الأنبوب أثناء الانفصال يؤدي إلى قوة التصاق قوية تحت الماء تصل إلى 65 كيلو باسكال.”
يتيح الطول المضافة للقسم الصلب الانفصال من خلال الصيد الميكانيكي الجانبي للساق ، أو يمكن تطبيق ضغط السوائل على الرغم من الجذع المجوف لإطلاقه.
تم استخدام التلاعب تحت الماء للصخور الصغيرة لإظهار القدمين في العمل.
وقال يون: “يمكن أن تتيح قبضتها القابلة للتحكم نقل الرقائق في الإنتاج الذي تقوده الصغرى”. “في الرعاية الصحية ، يمكن أن يؤدي التصاق العكسي الخالي من الغراء إلى بقع طبية حيوية ، وأجهزة استشعار يمكن ارتداؤها ، والأدوات الجراحية التي تعلق بشكل آمن على الجلد أو الأنسجة.”
اقرأ المزيد عن البحث فيأقدام أنبوب مستوحاة من النجوم لالتصاق ونقل مؤقت وقابل للتبديل‘، نشرت في Science Advances.
في العام الماضي ، كشف مركز Max Planck ETH لأنظمة التعلم العضلات الكهربائية الهيدروليكية الذكية لأرجل الروبوت.






